Research Project: Freehand Virtual Grasping
Physics Based Freehand Virtual Grasping
Authors: Ethan Lin, Emma Li, Jiasheng Shi, Edward Conte, Cooper Proctor, Una Wu
Abstract
In current VR systems, achieving realistic and intuitive interactions between the user and virtual objects is a significant challenge due to the disconnect between the virtual and real world. We seek to overcome this challenge by creating a physics-based, free-hand grasping model in Unreal Engine to make grasping virtual objects a more natural user experience in VR. Our model leverages Meta Quest Pro’s hand-tracking technology and Unreal Engine’s built-in physics to allow users to realistically interact with virtual objects using their bare hands without needing controllers, voice commands, or haptic gloves. We create our own force-calculation algorithm which calculates the normal force from each contact point in the hand to the virtual object. The normal forces are used to apply an impulse to the object and to find the static or kinetic friction between the hand and the virtual object. The static and kinetic friction relationship in our model mirrors real-world physics and gives the user a more free and natural experience of grabbing objects in VR.
Final Model
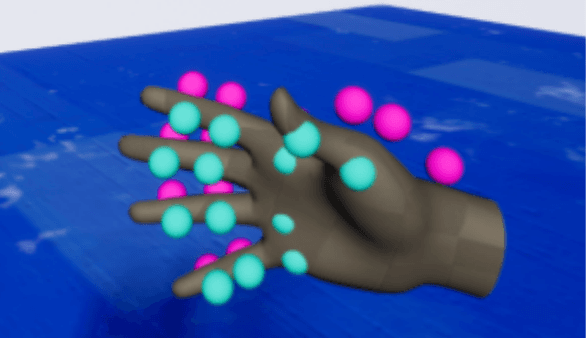
Our model uses colliders to detect collisions at specific points on the hand. When a collision occurs, a force is applied to the object at the collision point where the magnitude is determined by the velocity of the collider and the depth of the collider into the object. A “grab” state occurs when perpendicular forces are applied to an object such that there is approximately zero net force. When in the grab state, the object's physics is disabled and the object attaches to the hand until the conditions for the grab state no longer hold.
Force Vectors
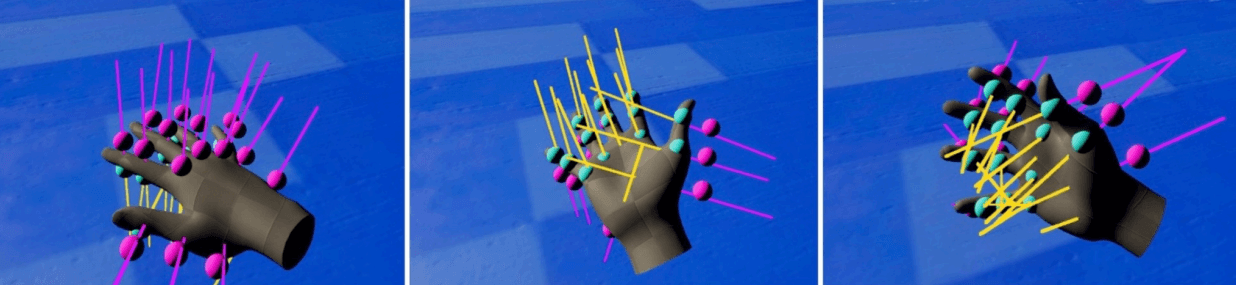
each collider has an associated vector perpendicular to the joint in the hand. The front colliders have force vectors that are normal to the palm and the back colliders have vectors that are normal to the back of the hand.
Grasping Behavior
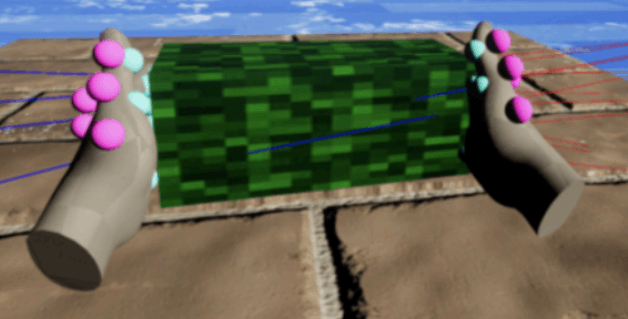
Our grab condition varies based on different grab circumstances (one-hand, two-hand, pinch, etc.), the general criteria to determine if a grab is present on an object at any time are:
- The number of colliders in contact with the object on hand is at least two and at least one collider’s normal vector opposes at least one other’s.
- The depth of each collider into the object is satisfactory to apply a force large enough to overcome and cancel any external forces.
Non-Grasping Behavior

When the grab conditions are not satisfied, our model accurately applies forces from the hand onto objects. Forces applied by contact points on the hand will push the object. The direction of the push is based on the force direction described above.
Conclusion
Our physics-based, free-hand grasping model in Unreal Engine accurately and intuitively simulates users’ interactions with virtual objects. The implementation is centered around our force-calculation algorithm, which finds the magnitude of the normal force applied to virtual objects from each finger joint and phalanx bone in the hand. We attach a collider sphere to each of these joints and bones. By utilizing Meta Quest Pro’s hand-tracking system, we can locate the coordinate points of each collider sphere in Unreal’s world space. The collider spheres' world location helps determine where a hand collision is detected on a virtual object's surface.
The collision points and depth values of each collider sphere inside the virtual object are then fed into our force-calculation algorithm, which calculates the normal force applied to the virtual object(s) from each collider sphere. If multiple normal forces oppose each other and balance out on different sides of a virtual object, then the gesture qualifies as a grip. The strength of this grip is determined by the depth detection on each collider in contact.
If the depth of the grip passes a set threshold, the normal forces are used to calculate the static friction for each contact point. Static friction would then be applied, allowing the virtual object to stay firmly in the user's grasp as long as the user applies enough force.
On the other hand, if the depth of the grab was detected to be too shallow, kinetic frictional force would be applied instead, causing the virtual object to slip out of the hand at a rate slower than gravity. Since our force-calculation algorithm is run once for every frame in Unreal, there is an easy transition between the kinetic state and static state, adding nuance and making the user experience more intuitive and natural, aligning with how humans interact with real objects.